Matlab and Simulink in Control
| 2022-11-04 21:34:18 Written by Fu, Jian |
MathWorks:Represent Nonlinear Dynamics Using MATLAB File for Grey-Box Estimation
利用灰箱估计再现非线性动力学
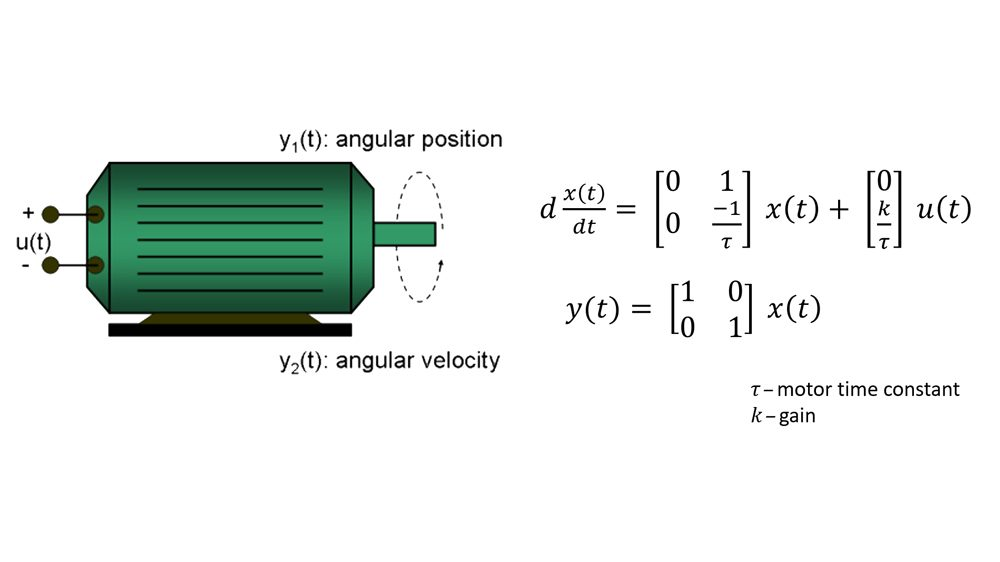
例如——直流电机DC的动态模型辨识。
source:模型降阶问题.ppt
Electronic – n ideal PWM frequency for DC brush motors
You have linear control of the 'speed' by applying a PWM signal, now the frequency of that signal has to be high enough so that your DC Motor only passes the DC component of the PWM signal, which is just the average. Think of the motor as a low pass filter. If you look the transfer function or relationship angular speed to voltage, this is what you have:
\[\frac{\omega(s)}{V(s)}=\frac{K}{\tau s+1} \]
This is the first order model of a DC motor or simply a low pass filter with cutoff frequency
\[f_c=\frac{1}{2\pi\tau}\]
Where \(\tau\) is the motor's time constant. So as long as your frequency is beyond the cutoff, your motor will only see the DC part or the average of the PWM signal and you will have a speed in concordance with the PWM duty cycle. Of course, there are some tradeoffs you should consider if you go with a high frequency.
从电机的动态模型分析PWM频率的取值。
Controlling brushed DC motors with pulsed width modulation
优缺点介绍。
Improve Brushed DC Motor Performance
Understanding the effect of PWM when controlling a brushless dc motor
Is there an ideal PWM frequency for DC brush motors?
PID 控制器自动调参

根据系统response time和transient behavior的要求,可以对系统的PID进行调节,从而控制系统的performances和robustness。
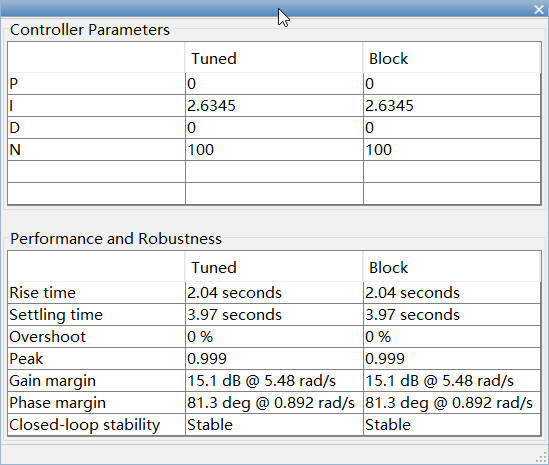
performances和robustness:
时间响应=暂态过程(过渡过程/瞬态过程)+稳态过程
动态性能: rise time \(t_r\):上升时间 peak time \(t_p\): 峰值时间 settling time \(t_s\):调节时间 overshoot $ % $:最大超调量,% peak:峰值
稳态性能: 稳态误差是控制系统精度或抗扰动能力的一种度量。 error: 稳态误差, steady-state error error band:
gain margin :增益幅值 phase margin:相位幅值 close-loop stability :闭环稳定性
The unit step response of the system 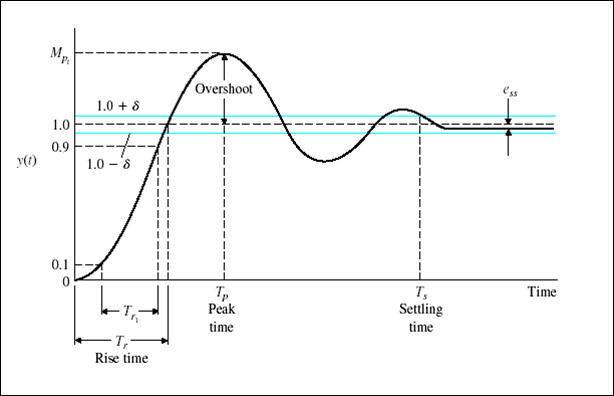
Simulink 环境基础知识(六)-- 调整视觉展示以提高模型的可读性
Simulink技巧——Add, Subtract, Sum of Elements, Sum
您可以通过在 List of signs 参数中的符号之间插入分隔符 (|) 来控制输入端口在模块上的位置。
使用simulink建立动态系统模型
 微信
微信 支付宝
支付宝
.jpg)
.jpg)
.jpg)
.jpg)