海洋仪器
DVL 利用发射的声波和接收的水底反射波之间的多普勒频移测量船舶相对于水底的航速和累计航程。这种计程仪准确性好,灵敏度高,可测纵向和横向速度,但价格昂贵。主要用于巨型船舶在狭水道航行、进出港、靠离码头时提供船舶纵向和横向运动的精确数据。多普勒计程仪受作用深度限制,超过数百米时,只能利用水层中的水团质点作反射层,变成对水计程仪(此时就从绝对速度变成相对速度)。
DVL和ADCP
DVL是一种类似于ADCP的声学多普勒仪器,采用发散式凸面换能器设计。
DVL和ADCP的主要区别在于,ADCP是测量海流流速(是相对IRF的绝对速度),而DVL主要是测量载体(船体,ROV,AUV等)速度。原理上是通过测量载体沿声束方向相对水底速度而实现。
DVL独立运行,在已知起始位置时,通过测量载体速度运行方向和时延,可计算出水下载体的当前位置和运行轨迹。所以通常对于AUV和ROV水下系统都留有DVL的输入接口,以实现AUV和ROV水下导航功能。当然水下当行定位系统还要有,惯性传感器,声学定位传感器,姿态传感器和高度计等其他组件。所有这些传感器其数据都会输入AUV和ROV水下导航主机中,通过各种模拟计算,最终得到精确的定位数据和运行轨迹。
DVL的数据对于这一定位计算是至关重要的,因为这种模拟计算是存在零均值偏差的而且数据是不能漂移的,如果没有DVL的数据,定位数据会随时间而逐渐飘移。DVL的数据能够帮助定位系统限定计算误差。
声学多普勒流速剖面仪(英语:Acoustic Doppler Current Profiler,缩写:ADCP)是一种融合水声物理、水声换能器设计、电子技术和信号处理等多学科而研制的测速声纳设备,作为水声技术的一个应用,多普勒流速测量为这些相关学科提供了一个综合应用平台。 声学多普勒流速剖面仪(ADCP),利用声学多普勒原理,测量分层水介质散射信号的频移信息,并利用矢量合成方法获取海流垂直剖面水流速度,即水流的垂直剖面分布。对被测验流场不产生任何扰动,也不存在机械惯性和机械磨损,能一次测得一个剖面上若干层流速的三维分量和绝对方向,是一种水声测流仪器。 ADCP的每个换能器轴线组成一个波束坐标,每个换能器测的流速是沿其波束坐标方向的流速,任意三个换能器轴线组成一组相互独立的空间beam坐标系。ADCP有其自身的坐标系(称为局部坐标系):X-Y-Z。Z方向同ADCP轴线方向一致。ADCP先测出沿每一波束坐标的流速分量;再把波束坐标系的流速转换为局部坐标系的三维流速;最后用罗盘和倾斜计提供的方向和倾斜角把局部坐标系的流速转换为地球坐标系的流速。 按安装方向区分,ADCP又可分为河岸固定式(若安装在船体侧面,则称为船舷式)、船底式和坐底式,分指侧向、朝下和朝上安装。安装在水域底部的坐底式ADCP和安装在船底的船底式ADCP以均匀的深度间隔测量纵向剖面的流速与流向;安装在河岸、墙体及桥墩等固定位置的河岸固定式ADCP则侧向测量岸与岸之间的剖面流速。(注意是固定安装方式,同样一般有深度的要求)
1 | 利用声学多普勒原理: |
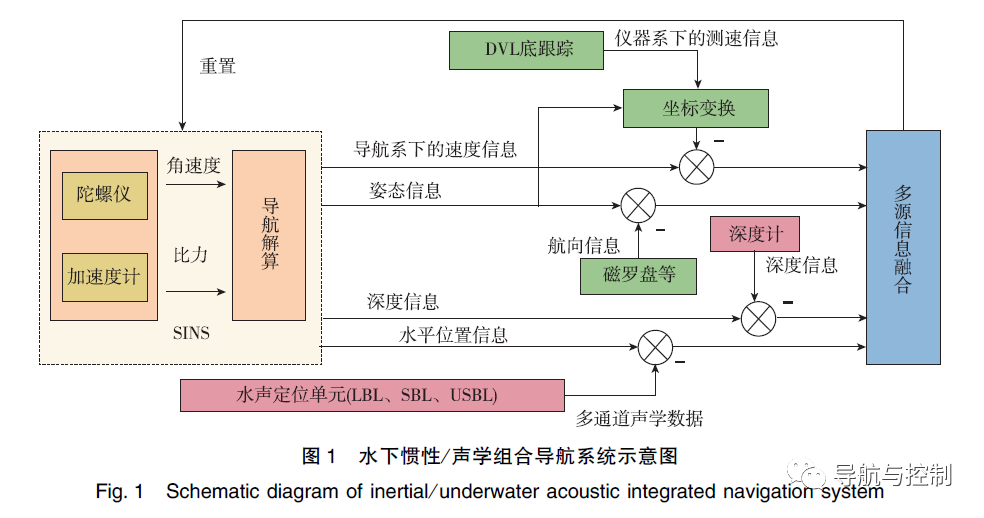
水下环境十分复杂,海洋无人小型平台对导航系统的隐蔽性、实时性等需求逐步提升,这些因素导致单一的导航系统早已无法胜任作业要求。惯性导航系统(Inertial
Navigation
System,INS)会随时间产生累积误差,因此需依据辅助导航信息来抑制INS的漂移,提高导航定位精度。随着微处理器计算能力与陀螺仪技术的进步,捷联式惯性导航系统(Strapdown
Inertial Navigation
System,SINS)因体积小、质量轻、成本低、维护方便,正成为当今水下导航设备的应用主流。目前,海洋无人小型平台主要采取INS与水声定位系统、多普勒计程仪(Doppler Velocity Log,DVL)结合的组合导航方式,上图给出了水下惯性/声学组合导航系统示意图。
DVL测速信息及水声定位单元提供的实时声速信息、声学数据与SINS提供的导航解算信息进行融合处理,输出导航定位信息并实时更新来对系统进行校正。在惯性导航系统中引入水下可用信号,充分发挥各测量仪器的优势,以实现高效、自主、隐蔽的高性能水下导航定位。
重心、浮心、稳心、漂心、转心的定义与区别
 微信
微信 支付宝
支付宝
.jpg)
.jpg)
.jpg)
.jpg)